Seawolf U-2
 Długość: 90cm
Długość: 90cm- Masa: 4,5 kg
- Skala: Nie dotyczy
- Typ: model statycznie zanurzający się.

Jest to druga wersja modelu, z pierwowzoru zostały wykorzystane kiosk, ogon i część kadłuba zewnętrznego.
Budowa:
W opisie tego modelu jest wiele odniesień do poprzednika, dlatego aby w pełni zrozumieć zmiany i usprawnienia zalecam, aby najpierw poczytać o Seawolfie U-1.Wnętrze, mechanizmy i uszczelnienia zostały zaprojektowane i wykonane od nowa. Jest to tak naprawdę nowy model oparty na poprzedniku. Zamykanie WTC zaprojektowane przez Robbe to jakaś totalna pomyłka, zostało więc od razu zlikwidowane i zastąpione śrubą dwa razy grubszą – 4mm. Poza tym to od Robbe zaczęło rdzewieć…
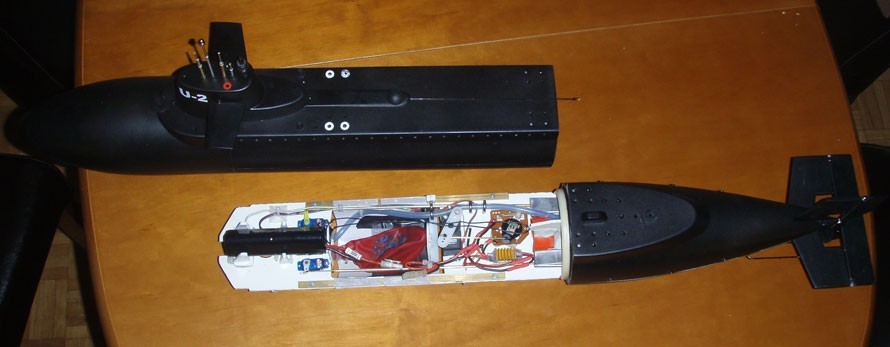
Na zdjęciu poniżej stare WTC z Seawolfa U1 (to brudne), oraz nowe, wycięte już przeze mnie i dodatkowo wzmocnione listwami mosiężnymi.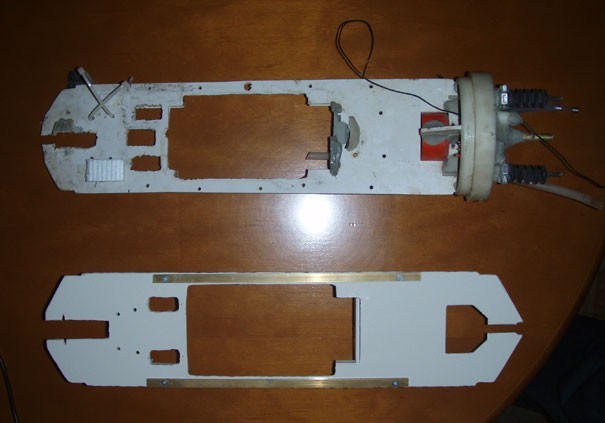
System zanurzenia statycznego opiera się na tej samej zasadzie co u poprzednika – pompa z elastycznym zbiornikiem balastowym. Wykonany jednak od nowa z kilkoma usprawnieniami jest o wiele bardziej dokładny i bezpieczniejszy. Operowanie systemem zanurzenia odbywa się też jednym kanałem mniej. Zbiornik balastowy jest teraz większy, przez co model w wynurzeniu pokazuje więcej pokładu. Dodatkowo zbiornik jest idealnie w centrum okrętu, co zapewnia bardzo dobry trym pod wodą. Dopływ wody zamykany jest automatycznie jak tylko pompa się wyłącza, a otwiera – jak tylko włączamy pompę w dowolnym kierunku.
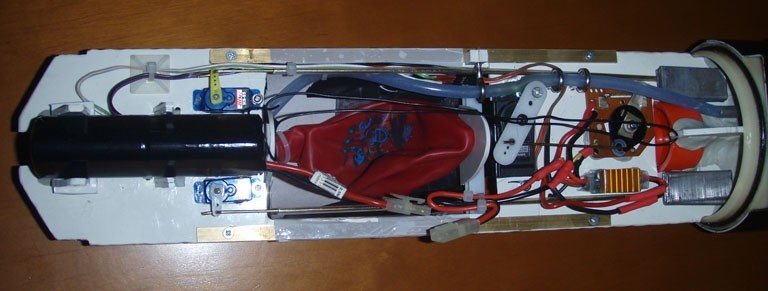
Wlot/wylot wody jest teraz umieszczony poziomo, nad poziomem pompy i ma własny odpowietrznik. Rozwiązanie takie zapewnia ciągłe zalanie zębatek pompy wodą i uniemożliwia zapowietrzenie się systemu. Jest to jedyne słuszne rozmieszczenie w przypadku użycia pompy zębatej, której charakterystyczną cecha jest słaba moc ssąca i minimalna odporność na zapowietrzenie. Pompa ma natomiast bardzo dobrą moc tłoczącą.

Pierwowzór rozkładał się na 3 części, a każdą trzeba było skutecznie uszczelnić i połączyć z następną. Był to proces szczególnie trudny do wykonania na trawie, gdzie byle źdźbło na uszczelce mogło spowodować podciekanie wody. U-2 rozkłada się więc już tylko na dwie części. Zmieniłem też uszczelkę na grubszą, lepszej jakości. Model można uruchomić więc na wodą o wiele szybciej niż poprzednika.
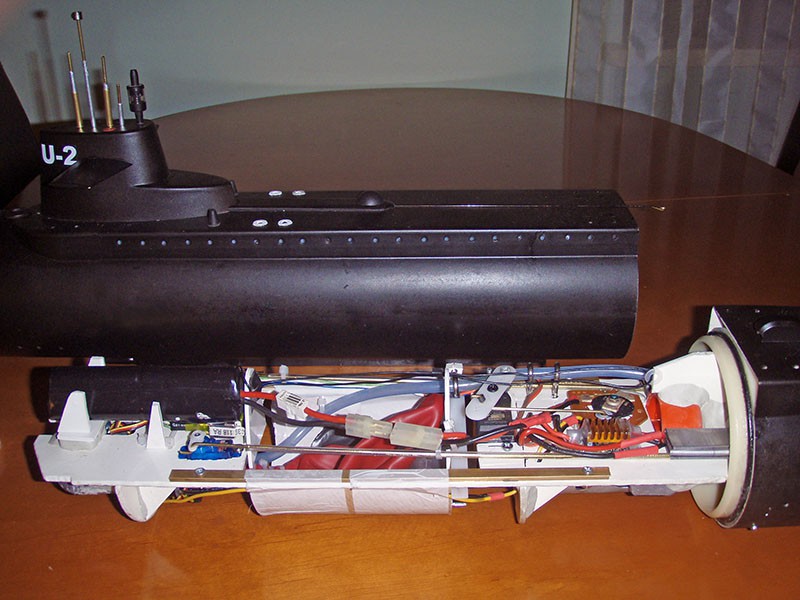
Dziobowe stery głębokości zostały zlikwidowane, ich mocowania wycięte i zaszpachlowane razem z dziurami po śrubach łączących dwie połówki kadłuba. Przednie stery głębokości są teraz na kiosku – jak na okrętach klasy Los Angeles. Przednie i tylne stery są teraz obsługiwane przez jeden serwomechanizm, całość reguluje się systemem dźwigni ukrytym w części rufowej.

Zasilanie i napęd także zostały zmienione, w odstawkę poszedł akumulator żelowy 6V, model jest teraz zasilany pakietem 7,2 V Ni-MH 2500 mAh lub Li – Ion 7,2 V 4400 mAh (taka sama masa pakietów nie wymaga zmiany trymu). Poprzedni silnik był dobry dla modelu zanurzającego się dynamicznie, dla modelu z system statycznym sprawiał tylko więcej problemów swoim nadmiarem mocy. Został zastąpiony silnikiem klasy 500 przeznaczonym pod wyższe napięcie. Pobiera teraz mniej prądu i kręci się wolniej co wpłynęło pozytywnie na zachowanie się i ekonomię modelu.




Model zachowuje się w wodzie inaczej niż poprzednik. Stery przeniesione na kiosk nie pomagają jak w poprzedniku przy manewrze zanurzenia. Model dużo lepiej trzyma natomiast poziom pod wodą. Reaguje jednak dość nerwowo na ruchy tylnymi sterami głębokości, w płytkiej wodzie łatwo utrzeć ogonem dno.

Pierwszy film kręcony spod powierzchni wody jaki udało mi się zrobić. Manewry w około 40cm wodzie przed kamerą na statywie to nie lada wyczyn. Z odrobiną cierpliwości wszystko jednak jest możliwe co pokazuje ostatnie ujęcie.